

準天頂衛星システム「みちびき」を利用したドローン送電網点検ソリューション

こんにちは!
ファンリードnote編集部です。
2024年7月30日に「『ベトナム国 / “みちびき”を利用したドローン送電網点検ソリューション 調査事業』が令和5年度補正 グローバルサウス未来志向型共創等事業費補助金に採択」というニュースリリースを配信しました。
今回は、こちらで提案した「送電線点検ソリューション」の内容について詳しく解説します。
ベトナムでは電力需要が急増
インドシナ半島に位置し、ASEAN加盟10カ国の中でも経済成長率が高い国、ベトナム。急速な経済成長や生活向上を反映し、ベトナムでの電力需要は年々増加しています。
増加する需要に対して、発電インフラの構築や給電管理体制の整備が追いついておらず、北部地域を中心に電力不足による停電が発生しており、市民の生活や工場での生産に多大な影響を与えています。

送電線点検作業における課題
これまでの送電線点検作業では、以下のような課題を抱えていました。
1. 安全性の問題
高所作業の危険: 送電線の点検は高所での作業が伴うため、作業員にとって危険が伴います。墜落や感電のリスクが高いです。
悪天候: 点検作業は天候に大きく左右され、悪天候時には作業が困難になります。風が強い日や雷雨の日は特に危険です。

2. 効率性の問題
時間がかかる: 送電線の長さが数百キロメートルに及ぶ場合、目視による人海戦術一つ一つの送電線を点検するのは非常に時間がかかります。
人手不足: 点検には高度な技術と経験を有する作業員が必要であり、人手不足が問題となることがあります。
3. 精度と範囲の問題
目視点検の限界: 作業員による目視点検では、微細な損傷や問題を見逃す可能性があります。特に広範囲をカバーする際には、精度にばらつきが生じやすいです。
アクセスの難しさ: 送電線が山間部や難アクセスな場所にある場合、点検が困難です。これにより、一部の送電線の点検頻度が低くなり、問題が見逃されるリスクが増加します。

4. データ管理と解析の問題
データの一元管理の難しさ: 点検で得られたデータを一元管理し、効果的に解析・活用するためのシステムが整備されていない場合が多いです。
アナログな記録方法: 手書きのメモや紙のレポートなど、アナログな方法で記録されることが多く、データの正確性や検索性が低下します。
これらの課題は、ドローン技術やAIを活用することで改善が可能です。
ドローンは安全かつ効率的に広範囲の点検を行い、データ解析システムを用いることで、問題の早期発見と対策が可能になります。

送電線点検におけるドローンの使用条件
これまで、送電線点検にドローンを使用する際に、クリアすべき条件がありました。
それは、「ドローンの位置と方位を正確に測位できること」です。
ドローンによる送電線点検においては、望遠高分解能カメラが捉えた画像は特定の送電線の限られた範囲となります。
このため、ドローン自身がどこにいて、どの部分を撮影しているかがわからない場合、カメラが捉えた映像から異常箇所を検出しても、どの送電線なのか・送電線のどこの部分なのかを識別が難しくなります。

映像を見ただけでは送電線のどこなのかがわかりません。
ドローンも、スマホと同様にGPSなどの測位衛星(GNSS)からの電波を受信する「衛星測位」で自分の位置を割り出します。衛星測位方法には1台の受信機で測位を行う「単独測位」と複数の受信機(または基準局)で測位する「相対測位」があります。
通常の単独測位では誤差は10mから20mになりますが、相対測位で主流となっているRTK(Real-Time Kinematic)測位では数cmの精度が実現可能です。
ここで、RTKの概要を簡単に説明します。
RTKの仕組み
RTKは、2つの主要なコンポーネントで構成されます。
基準局(または仮想基準点): ドローンとは別のGNSS受信機により正確な位置情報を取得し、補正情報としてドローンのGNSS受信機に送信します。
移動局(ドローン): ドローンに搭載されたGNSS受信機で、基準局からの補正データを受信し、自身の位置情報を高精度に補正します。
RTKは、基準局と移動局の間でリアルタイムに位置データを補正することで、単独測位では得られない高精度な位置情報を取得しますが、補正情報を送信するためのネットワーク環境が必須となります。
RTKが利用できない地域でのドローン測位方法:MADOCA-PPP
このように、ドローンの正確な位置が推定できるRTKですが、山間部や島しょ地域のようにネットワーク環境未整備のエリアではRTKは利用できません。
この課題に対して、私たちファンリードは日本の測位衛星:準天頂衛星システム「みちびき」がアジア・オセアニア地域に提供する「高精度測位補強サービス(MADOCA-PPP)」を活用します。
MADOCA-PPP(Precise Point Positioning)は、単独測位方式でありながら30㎝以下の高精度測位が可能となるサービスで、「みちびき」の信号をMADOCA対応受信機で受信するだけでRTKが使えないネットワーク環境未整備地域においても高精度測位を実現します。
ここからは、2023年度にベトナムで実施した、システムの実証実験の内容を説明します。
実証実験について
私私たちファンリードでは、MADOCA対応受信機をベトナム国産ドローンメーカーMAJ社の機体に搭載し、ドローンによる安全で効率的な送電線点検ソリューションの開発に取り組むこととなり、その実証実験を行いました。

実証実験の概要
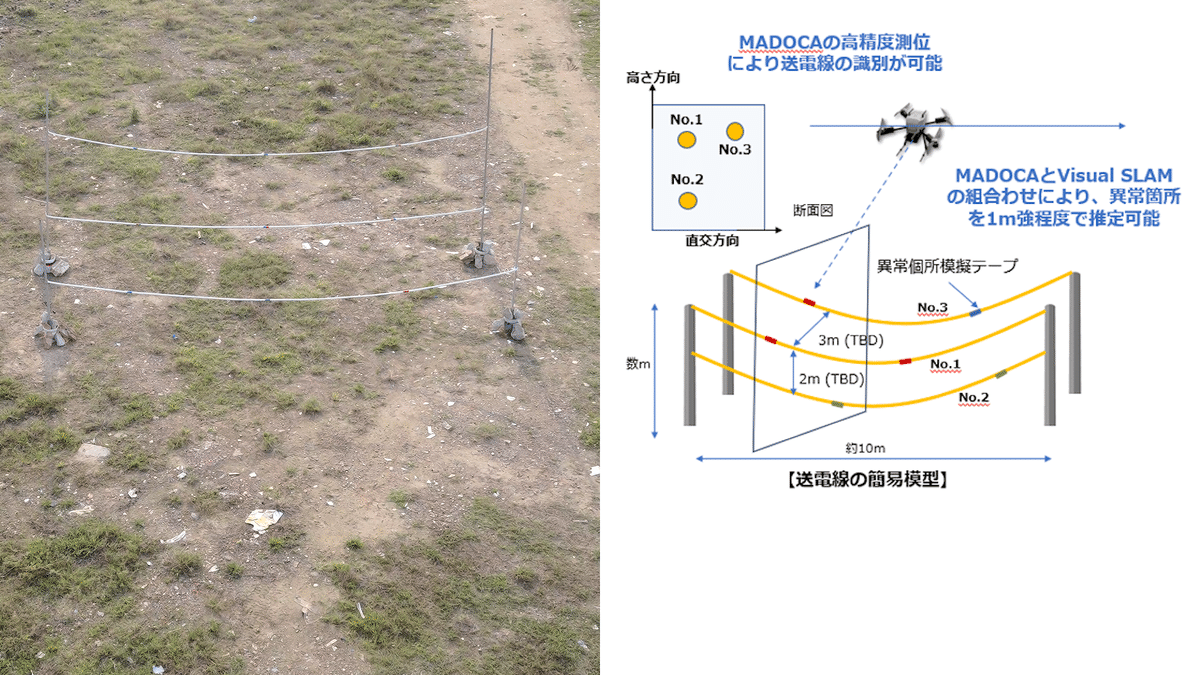
今回の実証実験では、ハノイ市内の実証実験実施サイトに設置した送電線の簡易模型を作成し、送電線の異常箇所を模擬したマーカーを設置。
ドローンの送電線からの距離や飛行速度・方位を変化させて送電線が的確に識別できるか/異常箇所の位置推定精度を3Dモデルにより評価しました。
3Dモデルの表現
簡易模型の3本の送電線は、3Dモデルでは緑、オレンジ、青の線として表現されています。
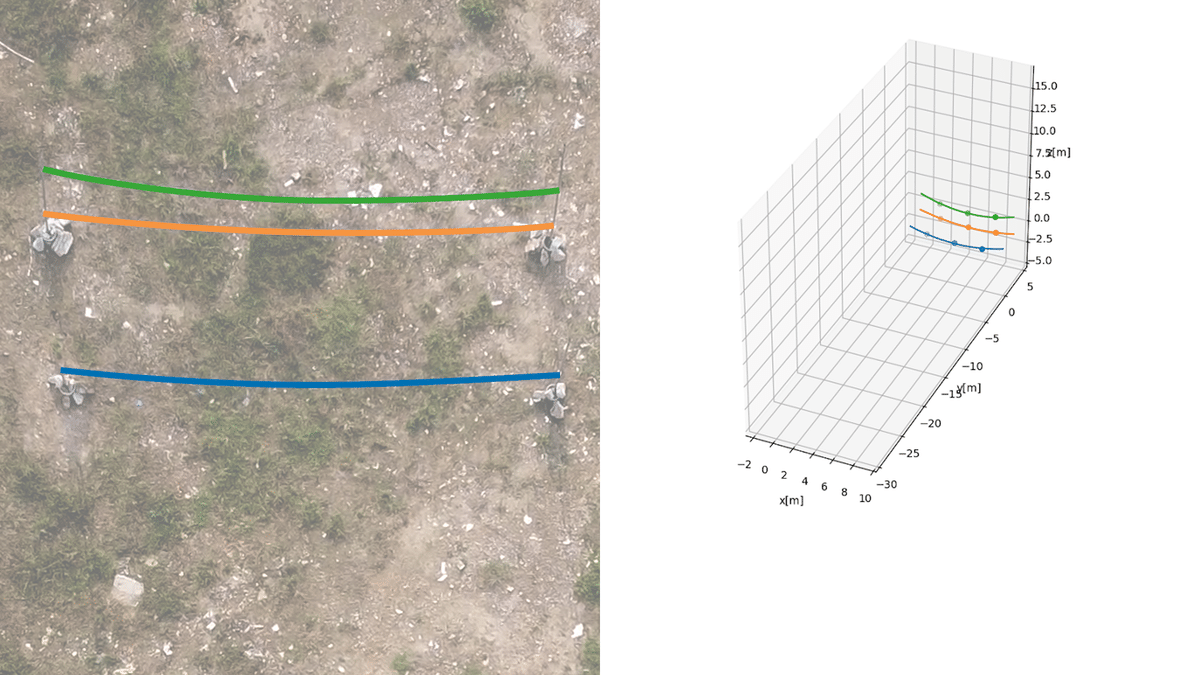
ドローンに搭載された高分解能カメラが簡易模型のオレンジで表された送電線の異常箇所を示すマーカーを捉える様子を視線ベクトルとして表現しています。

今回の実証では、送電線からの距離を約30mとした場合においてもすべての視線ベクトルがオレンジの送電線に最も近接しており、ターゲットとする送電線を正しく識別していることが分かります。
実証では、MADOCA-PPPの高精度測位とともに、ドローンが風の影響などで方向がずれた場合でも視線ベクトルの方向を正しく補正できるファンリードが開発したVisual SLAM(V-SLAM)技術を適用し、その有効性を確認しました。

このことから、MADOCA-PPPと提案手法(V-SLAM)を組み合わせることで、ドローンによる送電線点検において安全を確保できるスラントレンジ 30mを保った状態で、下記を実証することができました。
高精度に送電線識別が可能
異常個所位置推定を当初想定した1m強程度の精度で可能
まとめ
今回の実証実験をもとに、送電線点検ソリューションの実運用に向けた改良を進めていくとともに、風力発電タワーや橋梁などといった送電線以外のインフラ点検にも、活用の幅が広がることが期待されます。
なお、今回ご紹介した内容は、内閣府のHPで動画でもご紹介しております。
合わせてご覧ください。
(「インフラ点検/検査/監視」の中でご紹介されてます)
私たちファンリードでは、お客様のニーズに応え、革新的なサービスを提供していきます。
ここまでお読みいただき、ありがとうございました。